미래에스엔씨
ARDUINO
Robotic controller
홈 > ARDUINO > Robotic controller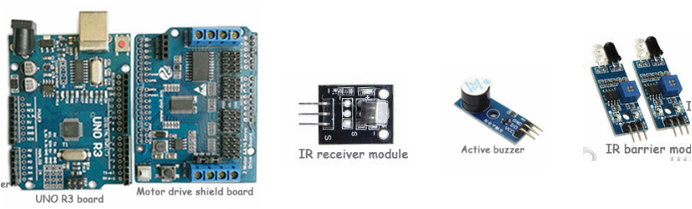
Introduction
2 웨이 모터 && 16 웨이 서보 드라이브 쉴드는 Arduino UNO R3 및 ESPduino 개발 보드와 호환됩니다. 이 모듈은 Arduino UNO 및 / 또는 ESPduino에 직접 삽입 할 수 있습니다. 그러나 ESPduino를 사용하면 WiFi로 제어되는 탱크 / 차량 섀시를 빠르고 편리하게 개발할 수 있습니다. 이 드라이버 실드는 양방향 DC 모터 (4.5 ~ 18v)와 16 웨이 서보 (5-18V)를 제어 할 수있어 로봇 암이있는 이동 로봇의 제어에 매우 적합합니다. 이 보드는 직접 양방향 DC 모터 또는 1-way 스테핑 모터를 구동 할 수있는 L293DD를 사용하여 설계되었습니다. 최대 전류는 1.2A입니다. 16 웨이 서보는 보드의 IIC 인터페이스로 제어됩니다. IO 인터페이스는 Arduino UNO 및 ESPduino의 제어 인터페이스로 사용됩니다. 따라서 D12, D13, D3, D1 인 ESPduino의 4 개 포트 D6, D7, D11 및 D12는 PWMB (모터 B의 속도), DIRB (모터 B의 회전 방향)로 정의됩니다. PWMA (모터 A의 속도) 및 DIRA (모터 B의 회전 방향). 인간형 디자인은 전원 스위치를 사용하여 편리하게 전원을 켜고 끌 수 있습니다. 보드는 Bluetooth (프리 서버) 및 / 또는 WiFi를 통해 지능형 로봇을 직접 제어하는데 사용할 수 있습니다.
Specifications
| POWER | Power for motor(VM) | 4.5V~36V, can power separately; |
|---|---|---|
| Power for servo(VIN) | 5~18V, can power separately; | |
| How to use power connection |
very important!
|
|
| Working Current Io | ≤1.2A; | |
| Max power consumption | 4W(T=90℃; | |
| Input for control signal | High level: 2.3V≤VIH≤VIN; low level: -0.3V≤VIL≤1.5V | |
| Working temperature | -25℃~+125℃; | |
| Driven mode | double big power H bridge driver; | |
| Weight | about 46g | |

